



In my last column, I introduced “productivity improvement through automation” as one of the values that robots provide. However, there are many cases where robots are controlled by humans, rather than being completely autonomous. In this column, I would like to look back at the history of robots, especially those that are controlled by humans, i.e., those that move based on human intention, and consider their future direction.
As I mentioned in my first column, in addition to automation, robots provide value in the form of “remote control” and “self-expansion. In each of these cases, not everything is done automatically, but the robot’s behavior is determined by the interaction between human and robot. It is a robot that is operated.
Remote-controlled robots appeared in the 1960s.
An easy example to share the image of a teleoperated robot may be in the field of animation. In the old days, “Tetsujin 28” and “Mobile Suit Gundam,” and not so long ago, “Ghost in the Shell,” were typical examples of piloted robots.
In Tetsujin 28, the main character Shotaro-kun remotely controls a giant robot with a small control device (remote control device). In “Ghost in the Shell,” the cyborg body can be moved directly from the brain through the use of electro-encephalization and artificial body technology.
But what about in the real world? In terms of remote control, Carlo Mancini and his colleagues at the CNEN (Center for Nuclear Energy Research) in Italy developed the “Mascot” mobile teleoperated robot in 1958.
In Japan, Dr. Tachi and his colleagues at the University of Tokyo began research on teleoperated robots in 1987. It is particularly surprising that at that time, research was being conducted in combination with Virtual Reality (VR) and other technologies.
In the 1980s, the Japanese government initiated a large-scale “Extreme Work Robot Project”. Many large companies, including Hitachi, Ltd., participated in the project and developed crawlers (infinite orbit vehicles) with remotely operated robot arms and quadrupedal robots for nuclear power plants and marine applications.
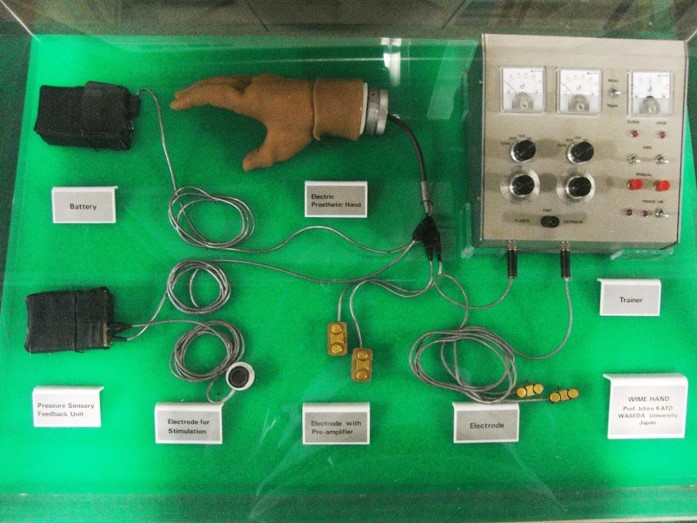
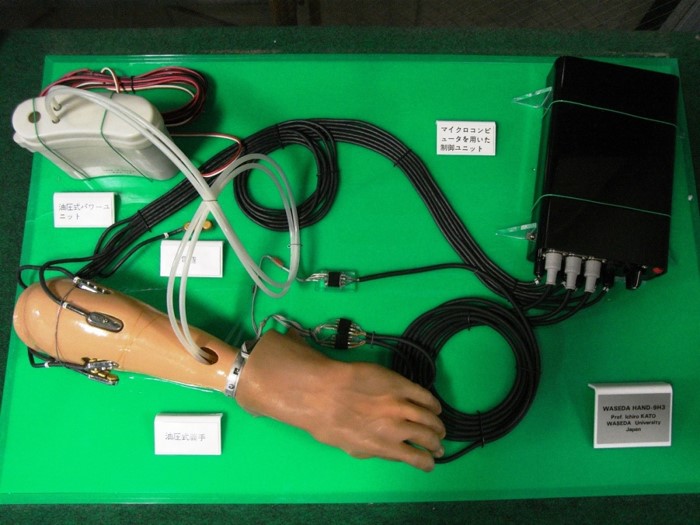
On the other hand, in terms of robots that control the body, artificial hands, as shown in Photo 1, have been the earliest research field. In 1969, it became possible to operate the hand based on biological signals (myoelectric signals) at the laboratory level, and in 1979, it was put to practical use as the “WIME Hand”, which was jointly developed with Imasen, Japan.
In addition to prosthetic hands, Ralph Mosher and his colleagues at General Electric started a project for a wearable robot called “Hardiman” in the 1960s.
The goal of the project was to make it possible for humans to work in extreme environments with the assistance of machines that directly transmit and amplify human movement. A variety of applications were explored, including industrial use.
Many ventures are developing Avatar in Japan.
The research and development of teleoperated robots, which began more than 50 years ago, is now finally finding more and more opportunities to be used in the field. In particular, the “avatar robot,” a typical example of a teleoperated robot, is on the point of entering a period of widespread use.As I mentioned in my first column, 2020 may be called the “First Year of Avatar”.
In Japan, there are several venture companies working on the development of avatar robots. Telexistence, chaired by Prof. Tachi of the University of Tokyo, GITAI, which develops work robots for space use, and Meltin, which is involved in the cyborg business, are developing new hardware for avatar robots.
Ory lab, which develops the communication robot OriHime, has actually set up a system in which a bedridden person at home can work as a waiter or waitress at a restaurant, taking orders remotely. It is reported that ANA-affiliated avatar-in will put 1,000 avatar robots into service, mainly for medical and welfare institutions.
Overcoming spatial constraints through remote work
This trend will continue for some time, partly due to the increased need for non-contact due to the COVID-19. In the world of After COVID-19, there will continue to be value in being able to transcend the limitations of space through remote work.
Overcoming spatial constraints means that tasks that were previously too far away to be done can now be done from close by, and conversely, tasks that were previously taken for granted to be done nearby can now be done from a distance. The latter applies to work in the service industry.
In particular, from the perspective of economic rationality, there is great potential for the introduction of these robots, as they can remotely secure the necessary labor force from the places where labor costs are the lowest in the world, or from the places where it is easiest to hire workers regardless of time differences.
On the other hand, tele-operated robots have the problem that productivity will not increase if they are used in a 1:1 relationship where one person operates one robot. In order to improve productivity, the person operating the robot needs to be able to operate his own body and other robots at the same time, or operate multiple robots at the same time.
Operating one’s own body and a robot at the same time may be a little difficult to imagine. An example of this approach is the “third arm” that the authors are developing to enable one person to do the work of two people (Movie 1).
In order to achieve productivity beyond 1:1, the technologies of “Shared Autonomy” and “Shared Control” will be important. Some readers may have heard of these technologies, as they are used in areas such as self-driving cars. It is a technology that allows robots to move autonomously to a certain extent in their own location, rather than having humans control everything.
Once these technologies are established, robots will basically be able to make decisions and work autonomously, and only tasks that are difficult for robots, i.e., tasks that are difficult to perform themselves, or tasks that require human confirmation, such as starting a task or recovering from an error, will be able to be switched to humans.
By combining autonomous control of robots with remote control by humans, Shared Autonomy will enable 1:N work, where one person controls N robots, without increasing the cognitive load on the operator.
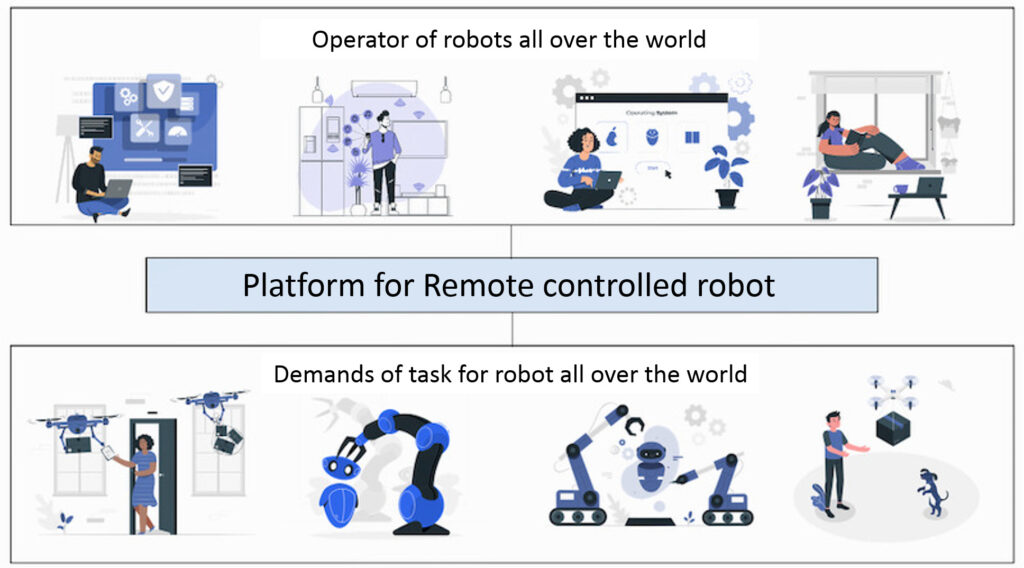
The platform connecting the operator and avatar will be important.
Teleoperated robots, which are being introduced in the form of 1:N, will be used in the form of N:M in the future. In other words, N pilots (operators) will operate M robots. In such a world where multiple things and multiple people are mixed together, the digital technology needed is a platform technology to match and manage them.
As shown in Fig. 1, platforms that connect operators around the world with avatar robots around the world will become important in the future. Telexistence has already announced its Augmented Workforce Platform (AWP), a platform for retail stores such as convenience stores, using Microsoft’s cloud service Microsoft Azure.
The full scope of AWP itself has not yet been revealed. It will probably eventually become a platform for matching workforce and jobs around the world, as well as an infrastructure for performing various tasks, including not only physical robots but also avatars in cyberspace.
This may be a bit of an exaggeration, but perhaps the teleoperated robots and the platforms that connect them will become the key starting point for a grand new world that will realize the “Metaverse” proposed by science fiction writer Neal Stephenson, involving not only cyberspace but also physical space.
Seen from this perspective, remotely operated robots are also an important part of advancing digital transformation (DX), and they will become very interesting.








